1) 以现场问题切入:为什么捲取/复卷最常卡在“张力”
在捲取(Winding)与复卷(Rewinding)产线上,张力往往同时影响外观与尺寸品质,也影响停机与耗材成本。现场最典型的症状包括:
- 张力漂移:同一卷前紧后松或相反,端面品质不稳定
- 皱褶、蛇行、端面不齐、荷叶边/望远镜(telescoping):卷材成型失败,下游加工报废
- 断带/裂边:加减速或换卷瞬间张力尖峰,薄材尤其明显
- 换卷瞬间崩张:接带、切换、制动/驱动响应跟不上,造成停机与返工
- 问题难追溯:缺少张力趋势与事件记录,只能靠“手感”反复微调
捲取/复卷的核心难点在于:卷径持续变化,使得“同样的扭矩”对应到“不同的张力”。因此张力控制不是单一元件能解决,而是一套可验证、可维持的控制架构。
> 一个最常用、也最能说明本质的关系式(本文唯一公式):
> 张力 T ≈ 扭矩 F ÷ 卷径半径 R
> 含义是:卷径越大,要维持同样张力需要更大的扭矩;卷径越小则相反。只要卷径估算、扭矩输出或反馈测量其中一项不稳,张力就会跟着漂。
---
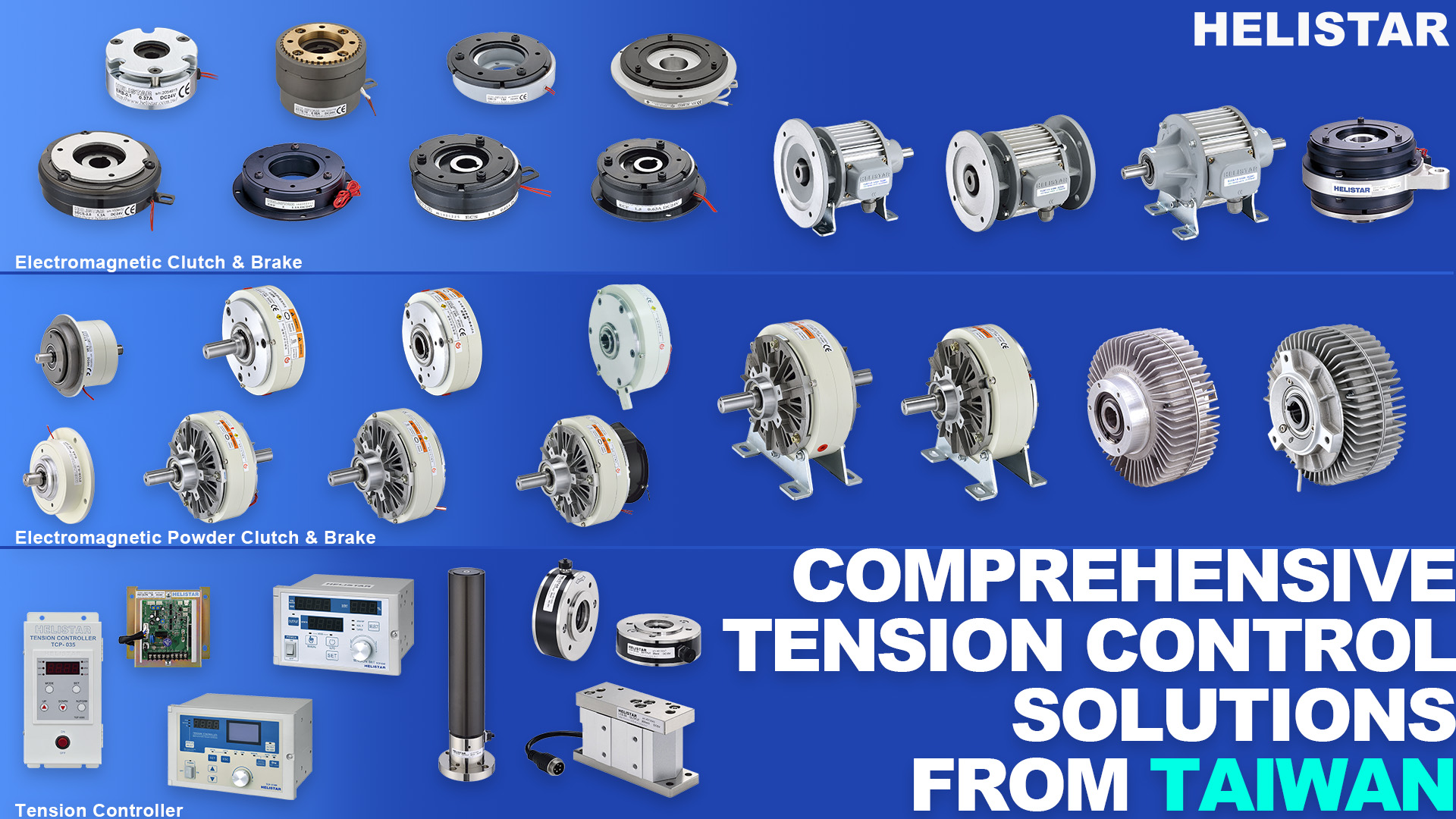
2) 为什么“磁粉式离合器/磁粉式制动器 + 张力控制器”适合捲取/复卷
在薄膜、纸材、无纺布、金属箔材、胶带等大量卷材设备中,收放卷端常见需求是:扭矩可连续调节、输出平顺、易整合、维护可预期。以 HELISTAR 常见配置来看,下列组合特别适合中高比例的工业捲取/复卷设备:
- 放卷端:以磁粉式制动器(PLB/PFB)提供可控制的制动扭矩,配合卷径补偿或张力反馈,稳定放料张力
- 收卷端:以磁粉式离合器(POC/PHC)或驱动端扭矩控制提供收卷扭矩,改善端面与密实度
- 控制核心:以张力控制器(TCP 控制器)进行张力设定、反馈运算与输出控制(可搭配 Load Cell 或摆臂信号)
这类方案的优势在于:
- 扭矩控制直观、调节范围大:适合需要快速试车、产品切换频繁的产线
- 系统整合成本可控:相较全伺服直驱,可用较低复杂度实现“可用且稳”的张力控制
- 可对卷径变化做补偿:搭配卷径估算/直径测量,使扭矩随卷径自动修正
- 易落地到分段控制:启动、稳态、减速、停机、换卷可设不同参数,降低尖峰张力
> 注意:若应用属于超高线速、极低张力、或加减速非常剧烈的工况,务必把工况产生的热能量/温升纳入规格选型。对多数“要兼顾品质与成本”的卷材设备而言,磁粉式离合器与磁粉式制动器搭配张力控制器,仍是高普及、易维护的主流选择。
---
3) 场景对照:不同材料/制程,张力控制重点不一样
下面用现场常见差异快速对位,帮助你判断应优先补强哪个环节。
3.1 薄膜与包装材料(PET/BOPP/PE 等)
- 痛点:材料薄、弹性明显,最怕张力波动导致皱褶与边裂
- 建议:优先采用 Load Cell 闭环或摆臂方案;加减速斜率要保守,避免瞬间尖峰
- 落地要点:张力信号滤波不要过度,否则换卷/加减速更容易失控
3.2 铜箔/铝箔/电池隔离膜
- 痛点:材料价值高、允许张力窗口小;低速稳定与张力尖峰抑制是关键
- 建议:高分辨率速度反馈(编码器)+ 张力闭环;设置张力上限保护与扭矩限幅
- 落地要点:重点检查导辊阻力、轴承状态与张力传感器安装受力路径,避免“假张力”
3.3 纸材/无纺布(常见宽幅)
- 痛点:端面、蛇行与张力常互相影响
- 建议:张力控制同时检查导辊排列与摩擦路径;必要时与纠偏(EPC)协同
- 落地要点:只靠拉高张力去“压蛇行”通常会引发断带与伸长,应回到机构与控制策略一并处理
3.4 胶带、黏性材料
- 痛点:粘辊、剥离阻力变化引起张力波动与表面缺陷
- 建议:尽量采用“真实张力”反馈(如 Load Cell),并配合防粘机构/清洁策略
- 落地要点:材料黏着可能导致摆臂反馈误判,需要特别评估
---
4) 选型与设计关键:把需求转成可验证的规格
要做好 tension control for winding,建议遵循“先定义需求 → 再选架构 → 最后选元件”的顺序,避免试车后才发现先天不足。
4.1 先定义四个基本输入
- 材料信息:宽度、厚度、弹性/延伸特性、允许张力范围(上/下限)
- 制程信息:线速范围、最大/最小卷径、加减速时间、是否不停机换卷
- 质量目标:端面、皱褶允收、裂边/断带率、外观缺陷条件
- 现况痛点:张力漂移在哪个段落最明显(启动、稳态、减速、换卷)
4.2 张力控制架构怎么选(实务版)
- 开环(卷径补偿扭矩控制):
优点是简单、成本低;限制是抗扰动能力较弱。适合张力容许较大、速度变化少的设备。
- 半闭环(摆臂/Dancer):
以位移反映张力变化,对扰动有缓冲;但需要机构空间,也要注意摩擦与迟滞。
- 闭环(Load Cell):
直接测量张力,适合高质量、高一致性或薄材/箔材;安装受力路径与信号品质是成败关键。
4.3 元件层级选择重点(对照 PLB/PFB + TCP)
- 磁粉式制动器(PFB):确认连续扭矩需求、散热/温升条件、低速稳定性与扭矩重复性
- 磁粉式离合器(PLB):确认收卷端扭矩范围、启动平顺性、长时间运行热容量
- 张力控制器(TCP 控制器):确认支持的反馈类型(Load Cell/摆臂)、采样/滤波设置、输出接口与分段参数能力
- 卷径来源:可用编码器积分、测径传感器,或由材料厚度推算;卷径不准会直接变成系统性张力漂移
---
5) 常见错误与现场注意事项(最容易导致返工的点)
- 用提高张力去“压住皱褶”:短期看似有效,但会提高裂边、伸长与断带概率,端面也可能更差
- 张力传感器安装受力路径不正确:Load Cell 若受侧向力、轴承阻力或导辊卡滞影响,读值会漂且难调校
- 滤波设太重:趋势更平滑但控制更迟钝,换卷/加减速时更容易出现尖峰或崩张
- 卷径估算不可靠:厚度用错、打滑未补偿、编码器取样位置不对,都会导致扭矩补偿方向错误
- 用同一组参数跑全流程:启动、稳态、减速、停机、换卷动态条件不同,建议至少做基本分段(含限幅/斜率限制)
---
6) 建议导入方式:先可控,再优化
若你正在改善既有机台,务实的导入顺序通常是:
- 先把测量做对:确认张力反馈(Load Cell 或摆臂)信号稳定、零点漂移可控、EMC/接地合理
- 再把卷径补偿补齐:至少确保卷径变化不会导致张力“一路漂”
- 最后做分段参数:针对启动/加减速/换卷设限幅与斜率,张力尖峰通常会明显下降
- 用数据取代手感:张力趋势、报警事件、换卷前后 Peak-to-Peak,都是快速定位问题的指标