1) 以現場問題切入:為什麼捲取/復捲最常卡在「張力」
在捲取(Winding)與復捲(Rewinding)產線上,張力通常同時影響「外觀與尺寸品質」以及「停機與耗材成本」。常見的現場症狀包含:
- 張力飄移:同一卷前緊後鬆或反過來,端面品質不穩
- 皺褶、蛇行、端面不齊、荷葉邊(telescoping):卷材成型失敗、下游加工報廢
- 斷帶/裂邊:加減速或換捲瞬間張力尖峰,薄材尤其明顯
- 換捲瞬間崩張:接帶、切換、制動/驅動響應跟不上,造成大量停機重工
- 問題難追溯:沒有張力趨勢與事件紀錄,只能靠師傅「手感」微調
捲取/復捲的核心難點在於:卷徑會持續變化,使得「同樣的扭矩」對應到「不同的張力」。因此張力控制不是單一元件能解決,而是一套可被驗證、可維持的控制架構。
> 一個最常用、也最能說清楚問題本質的關係式:
> 張力 T ≈ 扭矩 F ÷ 卷徑 R
> 意思是:卷徑越大,要維持同樣張力就需要更大的扭矩;卷徑越小則相反。只要卷徑估算、扭矩輸出或回授量測其中一項不穩,張力就會跟著飄。
---
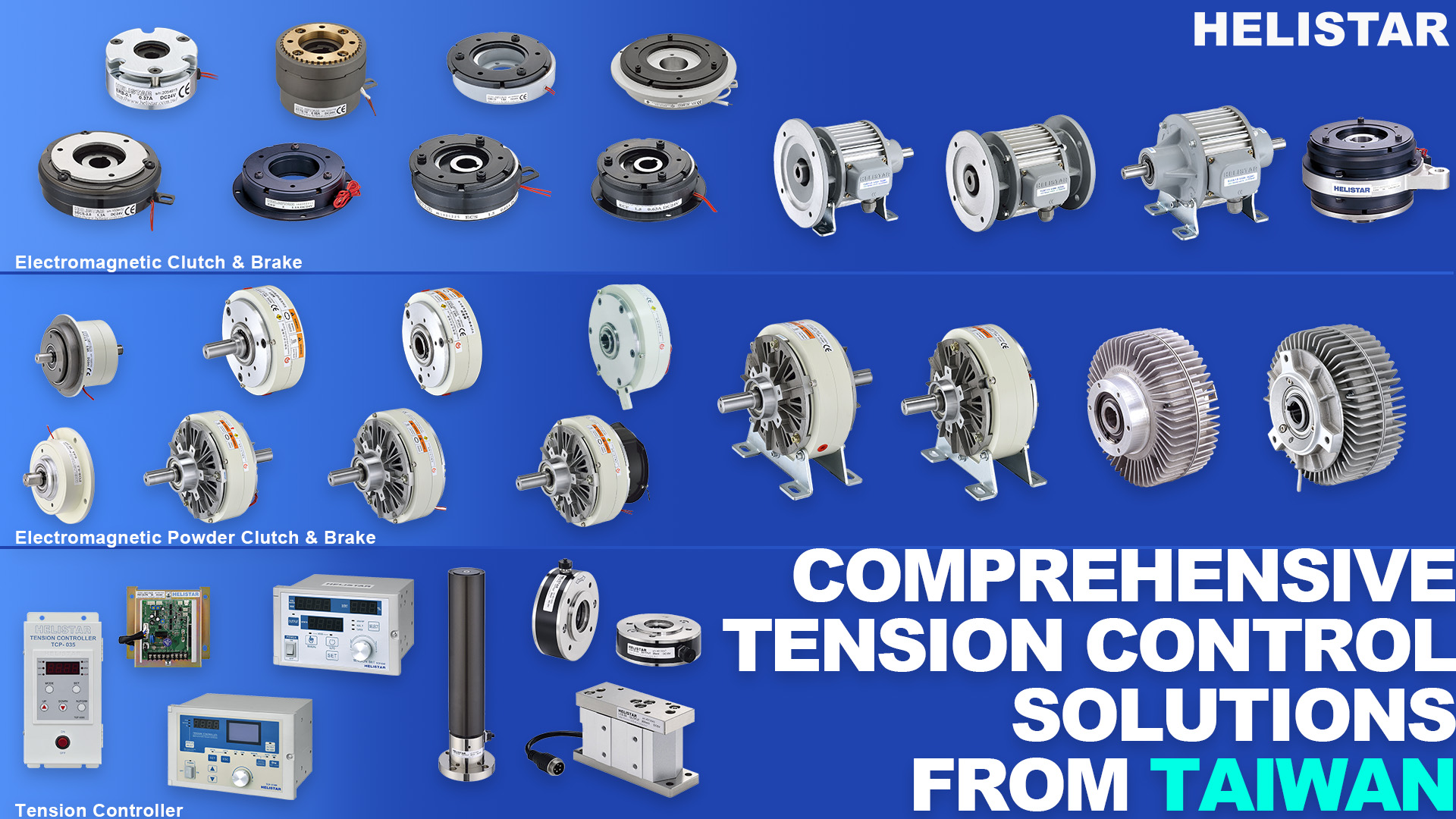
2) 為何「磁粉式離合器/磁粉式制動器(煞車) + 張力控制器」很適合捲取/復捲
在大量捲材設備(薄膜、紙材、不織布、金屬箔材、膠帶等)中,收放捲端常見的需求是:可連續調整扭矩、輸出平順、好整合、維護可預期。以HELlSTAR常見配置而言,以下組合特別適合中高比例的工業捲取/復捲機台:
- 放捲端:以 磁粉式煞車/制動器(PLB/PFB) 提供可控制動扭矩,配合卷徑補償或張力回授,穩定放料張力
- 收捲端:以 磁粉式離合器(POC/PHC) 或驅動端扭矩控制提供收捲扭矩,改善端面與密實度
- 控制核心:以 張力控制器(TCP 控制器) 進行張力設定、回授運算與輸出控制(可搭配Load Cell或擺臂訊號)
這類方案的優勢在於:
- 扭矩控制直覺、調整範圍大:適合需要快速試車、產品切換頻繁的產線
- 系統整合成本可控:相較全伺服直驅,能以較低複雜度完成「可用且穩」的張力控制
- 對卷徑變化可做補償:搭配卷徑估算/直徑測量,即可讓扭矩隨卷徑自動修正
- 容易落地到段落控制:起動、穩態、減速、停機、換捲各段可設不同參數,降低尖峰張力
> 提醒:若應用屬於超高線速、極低張力、或加減速非常劇烈的工況,一定要將工況產生的熱能量納入規格選型;在多數「要兼顧品質與成本」的捲材設備,磁粉式離合器與磁粉式煞車/制動器搭配張力控制器仍是高普及、易維護的主流選擇。
---
3) 場景對應:不同材料/製程,張力控制重點不一樣
以下用現場最常見的差異來快速對位,幫助你判斷該優先補強哪個環節。
3.1 薄膜與包材(PET/BOPP/PE 等)
- 痛點:薄、彈性明顯,最怕張力波動造成皺褶與邊裂
- 建議:優先採 Load Cell閉迴路 或擺臂方案;加減速斜率要保守,避免瞬間尖峰
- 落地要點:張力訊號濾波不要過度,否則換捲/加減速更容易失控
3.2 銅箔/鋁箔/電池隔離膜
- 痛點:材料價值高、容許張力窗口小,低速穩定性與張力尖峰抑制是關鍵
- 建議:高解析速度回授(編碼器)+ 張力閉迴路;設定張力上限保護與扭矩限幅
- 落地要點:特別注意導輥阻力、軸承狀況與張力感測器安裝受力路徑,避免「假張力」
3.3 紙材/不織布(寬幅常見)
- 痛點:端面、蛇行與張力往往互相影響
- 建議:張力控制同時檢視導輥排列與摩擦路徑;必要時與糾偏(EPC)做協同
- 落地要點:只拉高張力去壓蛇行通常會導致斷帶與伸長,需回到機構與控制策略一併處理
3.4 膠帶、黏性材料
- 痛點:黏辊、剝離阻力變動造成張力波動與表面缺陷
- 建議:盡量採「真實張力」回授(如Load Cell),並搭配防黏機構/清潔策略
- 落地要點:材料黏著會讓擺臂回授出現誤判,需特別評估
---
4) 選型與設計關鍵:把需求轉成可驗證的規格
要做好捲取/復捲張力控制,建議用「先定義需求 → 再選架構 → 最後選元件」的順序,避免試車後才發現先天不夠用。
4.1 先定義四個基本輸入
- 材料資訊:寬度、厚度、彈性/延伸特性、可允許張力範圍(上/下限)
- 製程資訊:線速範圍、最大/最小卷徑、加減速時間、是否不停機換捲
- 品質目標:端面、皺褶允收、裂邊/斷帶率、外觀缺陷條件
- 現況痛點:張力飄移在「哪個段落」最明顯(起動、穩態、減速、換捲)
4.2 張力控制架構怎麼選(實務版)
- 開迴路(卷徑補償扭矩控制):
優點是簡單、成本低;限制是抗擾動能力較弱。適合張力容許較大、速度變動少的設備。
- 半閉迴路(擺臂/Dancer):
以位移反映張力變化,對擾動有緩衝;但需要機構空間,也要留意摩擦與遲滯。
- 閉迴路(Load Cell):
直接量測張力,適合高品質、高一致性或薄材/箔材;安裝受力路徑與訊號品質是成敗關鍵。
4.3 元件層級的選擇重點(對應PLB/PFB + TCP)
- 磁粉式煞車/制動器(PFB):確認連續扭矩需求、散熱/溫升條件、低速穩定性與扭矩重複性
- 磁粉式離合器(PLB):確認收捲端扭矩範圍、起動平順性、長時間運轉的熱容量
- 張力控制器(TCP 控制器):確認支援的回授類型(Load Cell/擺臂)、取樣/濾波設定、輸出介面與段落參數能力
- 卷徑來源:可用編碼器積算、測徑感測器,或由材料厚度推算;卷徑不準會直接變成「系統性張力漂移」
---
5) 常見錯誤與現場注意事項(最容易造成重工的點)
- 用提高張力去「壓住皺褶」:短期看似有效,但會提高裂邊、伸長與斷帶機率,端面也可能更糟
- 張力感測器安裝受力路徑不正確:Load Cell若受側向力、軸承阻力或導輥卡滯影響,讀值會漂且難以調校
- 濾波設太重,趨勢變平滑但控制變遲鈍:換捲/加減速時更容易出現尖峰或崩張
- 卷徑估算不可靠:用錯厚度、打滑未補償、編碼器取樣位置不對,都會導致扭矩補償方向錯誤
- 用同一組參數跑全流程:起動、穩態、減速、停機、換捲的動態條件不同,建議至少做基本段落化(含限幅/斜率限制)
---
6) 建議導入方式:先可控、再最佳化
若你正在改善既有機台,務實的導入順序通常是:
- 先把量測做對:確認張力回授(Load Cell或擺臂)訊號穩定、零點漂移可控、EMC/接地合理
- 再把卷徑補償補齊:至少確保卷徑變化不會造成張力「一路漂」
- 最後做段落參數:針對起停/加減速/換捲設限幅與斜率,張力尖峰通常會明顯下降
- 用數據取代手感:張力趨勢、警報事件、換捲前後Peak-to-Peak,都是能快速定位問題的指標