1. 現場で起きる課題:テンションの微小変動が品質と歩留まりを同時に落とす
スリッター/ラミネーターでは、テンション(張力)のわずかな揺れが、次の不具合を連鎖的に引き起こします。
- しわ、蛇行、伸びムラ、寸法不良
- 破断、貼り合わせ位置ズレ、気泡、剥離
- 巻取端面不良、巻硬さのばらつき、スリット面の荒れ(毛羽・バリ)
特に「立上げ時は良いが、速度変更や巻径変化で崩れる」「担当者によって条件出しが変わる」といった課題は、制御ゲイン以前にゾーン設計(張力をどこで決めるか)と、計測・アクチュエータの整合で差が出ます。
本稿では、スリッター/ラミネーターで再現性を出すための設計・選定・調整ポイントを、実務で使える順序で整理します。
---
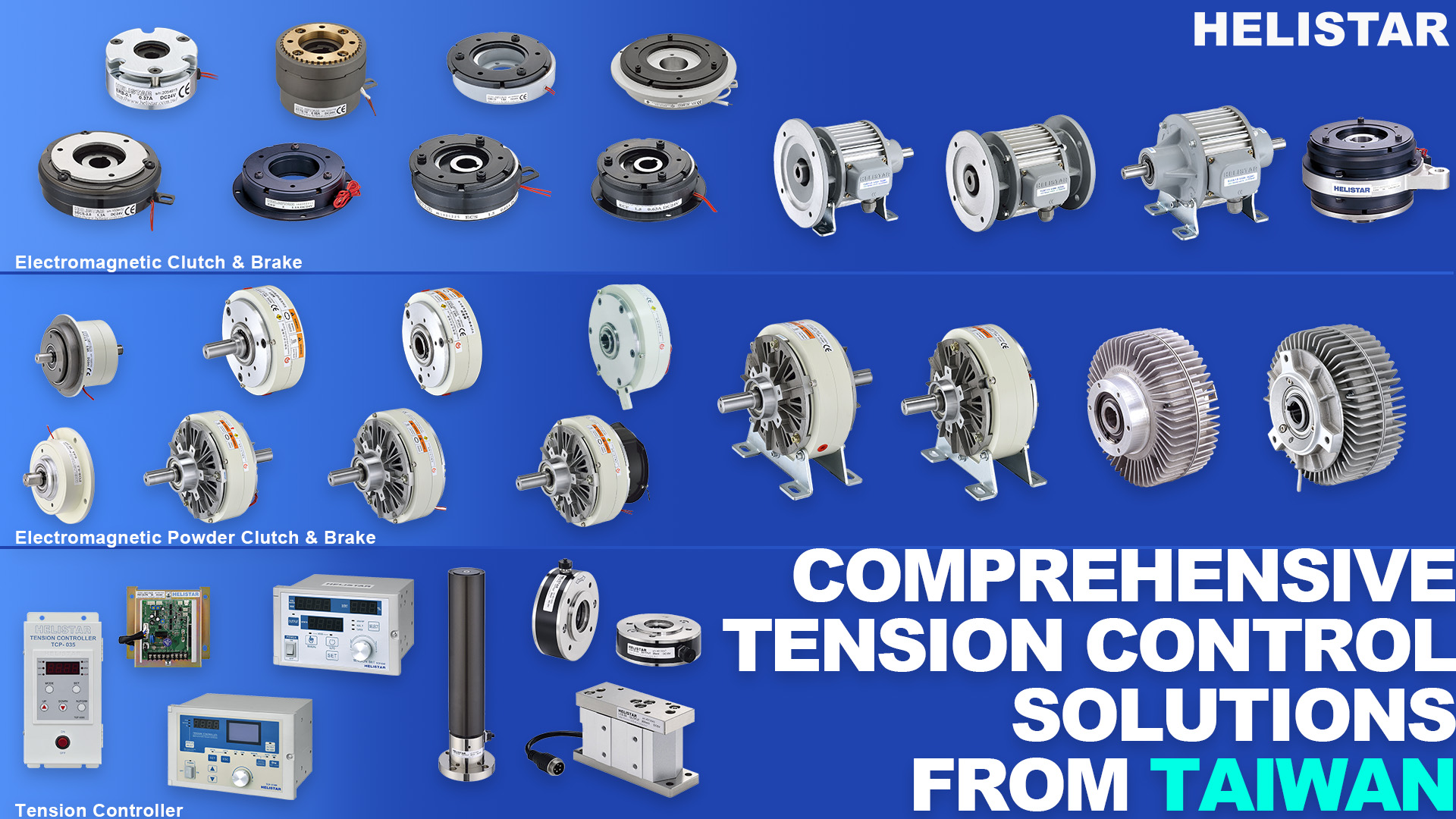
2. なぜこの解決策が適合するのか:パウダブレーキ+テンションコントローラーの強み
スリッターやラミネーターの巻出側では、構成の簡潔さと安定したトルク付与が重要です。ここで有効なのが、パウダブレーキ(PLB / PFB)とテンションコントローラー(TCP)を組み合わせた張力制御です。
パウダブレーキが巻出に向く理由
- 安定したトルクを出しやすい:回転数に依存しにくい特性を作りやすく、巻径が変化しても制御設計を組みやすい
- 応答が素直で調整しやすい:現場調整で狙い値に追従させやすい
- 設備更新の互換性が高い:既設の巻出機構へ組込みやすく、更新工事の負担を抑えやすい
テンションコントローラー(TCP)が効くポイント
- ロードセル/ダンサ等の信号を受けて張力を閉ループ化し、巻径推定誤差や摩擦変動の影響を抑える
- 加減速・停止など外乱が大きい局面で、張力の崩れを最小化する制御を組み込みやすい
> 重要なのは「部品の性能」だけでなく、張力を決める場所(ゾーン)・計測位置・制御対象(ブレーキ/駆動)をセットで整えることです。
---
3. 工程差の整理:スリット/ラミネート/多軸巻取で“効く設計”が変わる
同じテンション制御でも、トラブルの出方は工程で変わります。代表的な違いを先にマッピングします。
スリッター:切断点前後のテンション勾配が品質を左右
- 典型現象:バリ、毛羽、切れ不良、スリット幅の不安定
- 主因:スリット点前後で張力が干渉し、刃先負荷が脈動する
- 方向性:スリット点を中心にゾーンを分ける(張力の“決定点”を明確化)
ラミネーター:ニップ前後の不一致がしわ・気泡・ズレを作る
- 典型現象:しわ、気泡、層間ズレ、貼り合わせ位置ズレ、剥離
- 主因:ニップ圧ムラ+速度差+摩擦差により、テンション外乱が発生
- 方向性:ニップ前後を別ゾーンとして独立させ、干渉を最小化
多軸巻取:巻径成長差が張力ばらつきを生む
- 典型現象:端面段差、巻硬さ不均一、片寄り
- 主因:各軸で巻径増加が異なるのに同一ロジックで制御
- 方向性:軸別補正(巻径推定・トルク配分)+必要に応じて張力テーパ
---
4. 選定・設計の要点:ゾーン、計測、パウダブレーキ、テンションコントローラーの順に決める
4-1. まず「ゾーン(セクション)張力」を設計する
張力問題の多くは、制御器調整ではなく「張力の責任分界」が曖昧なことが原因です。基本は次の3ゾーンで整理します。
- ゾーンA:巻出張力(原反を安定供給)
- ゾーンB:プロセス張力(スリット点/ラミネート点の品質確保)
- ゾーンC:巻取張力(巻硬さ・端面品質)
ポイントは、ニップ・駆動ローラ・ガイドがゾーン境界にあると干渉が出やすい点です。機械配置の段階で「どのローラ間で張力を決めるか」を明確にします。
4-2. 計測はロードセル/ダンサを目的で使い分ける
- ロードセル:張力を直接計測でき、品質要求が厳しい薄膜・高付加価値用途で有利
- 注意:巻付け角、ローラ摩擦、フレーム剛性、設置角で精度が大きく変わる
- ダンサ:張力変動の吸収(バッファ)に強く、加減速や外乱に粘る
- 注意:張力は位置経由の間接制御になり、絶対値精度は設計次第
実務では、ロードセル(張力決定)+ダンサ(外乱吸収)の役割分担が有効なケースが多くあります。
4-3. パウダブレーキ(PLB / PFB)の選定は「常用トルク帯」で決める
パウダブレーキは、必要トルクに対してレンジが合っていないと、分解能不足や飽和で張力が揺れます。目安としては、常用運転時の制御量がレンジの中間域に収まるようにします。
ここで理解に役立つ関係式は次の1つだけです。
- 張力 T と必要トルク τ の関係:T ≈ τ / R(R:巻径の半径)
つまり、巻径Rが変わると、同じ張力でも必要トルクが変わるため、巻径変化を前提に「トルク余裕」と「低張力域の分解能」を確保することが重要です。
4-4. テンションコントローラー(TCP)は「外乱が出る場面」から仕様を決める
TCP選定では、定常時の性能だけでなく次を確認します。
- 加減速時に張力が増える/減る方向(外乱符号)の把握と補正のしやすさ
- ロードセル信号のフィルタ設計(遅れを作りすぎない)
- 制御出力の分解能と応答(パウダブレーキ側の特性と整合)
---
5. よくある失敗と注意点:張力が合わない原因は「制御以前」に潜む
失敗1:ロードセルの設置条件が悪く、数値が“正しく揺れる”
- 症状:張力指示が不安定、ゲインを下げると追従しない
- 典型原因:巻付け角不足、ローラ摩擦過大、フレームたわみ、センサレンジ不適
- 対策:巻付け角の確保、低摩擦化、剛性見直し、レンジ再選定(常用30〜70%目安)、校正手順の標準化
失敗2:ゾーン分割が曖昧で、ニップやガイドが張力を“勝手に作る”
- 症状:ニップ通過で張力が段差、蛇行が増える、ラミでしわ戻り
- 対策:ニップ前後を別ゾーン化し、張力の決定点(センサと制御対象)を再配置
失敗3:定常は良いが、加減速・停止で破断する
- 症状:立上げや減速で張力が跳ねる/抜ける
- 対策:加減速プロファイルを先に合わせる、ダンサで外乱吸収、必要に応じてフィードフォワードを追加
- 現場手順としては「機械要因→計測→ゾーン→加減速→巻取品質(テーパ)」の順が再現性を出しやすいです。
---
6. 推奨アプローチ:まず“困っている現象”から最短で仕様に落とす
スリッター/ラミネーターのテンション課題は、材料・速度域・機械構成で最適解が変わります。HELISTARでは、パウダブレーキ(PLB / PFB)とテンションコントローラー(TCP)を前提に、以下の観点で適用診断を行い、ゾーン設計から実装・立上げまで一貫して支援可能です。
- 巻出:巻径変化と低速域の安定性(張力脈動の有無)
- プロセス:スリット点/ニップ点の干渉(ゾーン境界の見直し)
- 巻取:端面品質・巻硬さ(必要なら張力テーパや軸別補正)